paolone ha scritto:
Ciao
ho visto con piacere il tuo Magnorail inserito nel tuo "splendore dappaura"

Quando avevo postato questo video
https://www.youtube.com/watch?v=M4EOT1X ... 5A&index=1 i commenti stati molto critici
grazie per gli apprezzamenti.
per quanto riguarda i commenti più critici...
E' ovvio che il sistema è meno flessibile del Faller, ma elencherò alcuni pro e contro, come già fatto nel mio sito
Il principale problema del Faller è la non realistica andatura, cioè stessa velocità sia in rettilineo che in curva, poi la distanza fra i mezzi, c'è da augurarsi che le velocità siano sincronizzate. Poi le fermate e le partenze sono per me allucinanti.
Nella versione standard questa è la situazione. Per ovviare bisognerebbe implementare un sistema ad infrarossi (c'è un sito dedicato in lingua tedesca) ma ci vuole una discreta dimestichezza con l'elettronica è l'operazione non è banale. Poi bisognerebbe far gestire il tutto da un software. In ultimo mezzi di piccole dimensioni non sono motorizzabili.
Personalmente non ho mai preso in considerazione questa soluzione, anche perchè nel mio plastico non ci sono strade adatte.
Ho voluto invece sperimentare il sistema Magnorail (anche se poi me lo sono autocostruito) per movimentare una parte del plastico che sarebbe rimasta statica.
Nella mia testa la circolazione dei veicoli non sarebbe continuativa. Avendone messo solo tre in pista, almeno due posso nasconderli, mentre il terzo, come spiego sempre nel mio sito, si fermerebbe per la salita e discesa dei passeggeri, magari con un discreto tempo di attesa. Questo è reso possibile dal controllo tramite software, quindi non è più che una scenetta per l'osservatore.
Nonostante la velocità sia costante e non elevata (per cui anche l'andamento in curva non è sgradevole), come si dovrebbe fare in un centro urbano, la differenza di dimensione dei mezzi inganna l'occhio, per cui sembra che l'ape vada più veloce della navetta, è abbastanza soddisfacente.
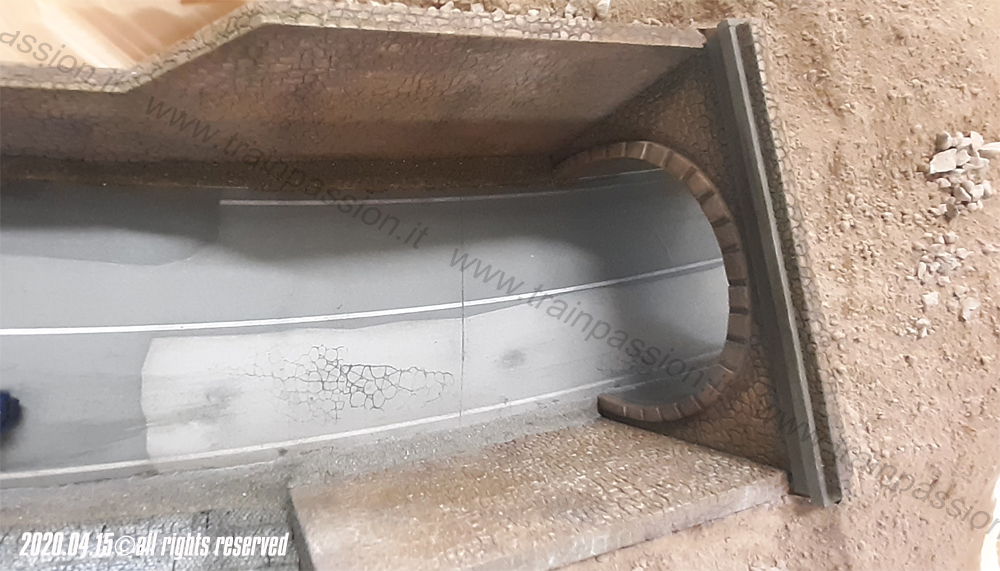
Ho riletto il tuo post e fra le critiche mosse ho rilevato la seguente: "l'usura del fondo stradale dovuta allo strisciamento dei pattini". In effetti il problema me l'ero posto e ho risolto distanziando i magneti dei mezzi dal fondo, per cui non c'è nessun attrito e nessun pattino. I mezzi circolano sulle proprie ruote.
Per quanto riguarda le biciclette, queste avrebbero bisogno di un percorso differenziato, quindi altra catena e altri motori... non me la sono sentita di azzardare.
Le moto le ho scartate a priori perché la piega in curva non mi riesce di pensarla.
In ultimo mi sono concesso un vezzo del quale parlerò più avanti. Sfruttando un progettino per un telecomando ad infrarossi (con PIC microchip) sono (quasi) riuscito a dotare la navetta di luci e frecce, pilotabile sempre tramite software in DCC. Ho trovato una LI.PO di ridotte dimensioni e ho anche studiato un sistema di ricarica agile... vedremo più avanti. Quindi la scenetta prevederà tre veicoli in movimento, in un punto determinato la navetta rallenterà, metterà la freccia e si fermerà. Ripartirà dopo una sosta (variabile secondo uno schema orario, lo stesso che gestisce il plastico) sempre mettendo la freccia e con una partenza graduale.